Асинхронный двигатель.
 Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
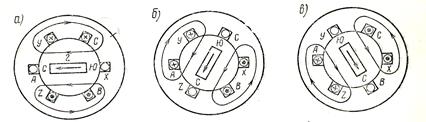
Примечание: для упрощения понимания создания вращающегося магнитного поля следует вспомнить об обратимости электрических и электромагнитных явлений. Так, например, для получения 3-х фазного переменного напряжения при помощи 3-х фазного генератора необходимо было вращать ротор с его магнитным полем. Но если, наоборот, подать 3-х фазное напряжения на статорные обмотки, то они создают вращающееся магнитное поле. Причем, за один период изменения тока в любой статорной обмотке магнитное поле повернётся на 360 градусов, т.е. на 1 оборот.
Простейший асинхронный двигатель состоит из статора и ротора. В пазах сердечника статора укладывают 3 обмотки, смещенные относительно друг друга на 120 градусов. Концы обмоток выводятся в клемную коробку двигателя, где они соединяются между собой или по схеме «звезда» или «треугольник».
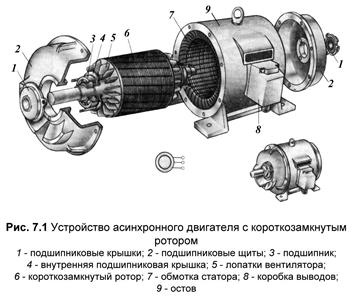 Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Принцип действия:
При подаче 3-х фазного напряжения на статорные обмотки двигателя они создают вращающееся магнитное поле. Данное магнитное поле пересекает проводники ротора и в них индуктируется ЭДС. Так как проводники ротора замкнуты между собой, то под действием ЭДС по ним потечет ток. На проводники с током ротора, находящимся в магнитном поле статора, будут действовать выталкивающие силы. Эти выталкивающие силы и создают вращающий момент на валу ротора, под действием которого ротор вращается в ту же сторону, куда вращается магнитное поле статора.
Частота вращения магнитного поля статора обозначается – n1,и определяется по формуле:
n1= 60f/P
где: f – частота питающего тока
P –число пар полюсов
60 –коэффициент перевода единиц измерения из об/сек в об/мин
На локомотивах применяют асинхронные двигатели с разным количеством обмоток. Причем, количество обмоток всегда кратно 3. Таким образом, двигатели могут иметь 3 обмотки, 6 обмоток, 9 обмоток и т.д. Каждые 3 обмотки у асинхронного двигателя приравнивается к одной паре полюсов. Соответственно, при увеличении количества статорных обмоток частота вращения магнитного поля уменьшается.
Данные о величине частоты вращения разнополюсных машин при питании током промышленной частоты (f=50Гц) приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | Подсчет n1 по формуле | Значение n1 ( об/мин) | Примечание |
| 60×50/1 | 3 обмотки по кругу занимают пространство 3600, поэтому за один период изменения тока магнитное поле повернется на3600. | |||
| 60×50/2 | 3 обмотки из 6 по кругу занимают пространство 1800, поэтому за один период изменения тока магнитное поле повернется на1800. | |||
| 60×50/3 | 3 обмотки из 9 по кругу занимают пространство 1200, поэтому за один период изменения тока магнитное поле повернется на1200. |
Частота вращения ротора обозначается – n2
Для того, чтобы на валу ротора создавался вращающий момент, необходимо выполнение данного условия:
n2‹ n1
Поэтому такие двигатели называются асинхронными. Приставка «а» означает «не», то есть несинхронные двигатели.
Отставание ротора от магнитного поля статора характеризуется скольжением (S). Скольжение определяется по данной формуле:
S= (n1 –n2)/ n1 ×100%
Скольжение показывает, на сколько процентов частота вращения ротора меньше частоты вращения магнитного поля статорных обмоток. Значение n2 при определенном скольжении для различных асинхронных двигателей приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | n1 (об/мин) | S (%) | S (об/мин) | n2 (об/мин) |
 Механическая характеристика и свойства асинхронных двигателей.
Механическая характеристика и свойства асинхронных двигателей.
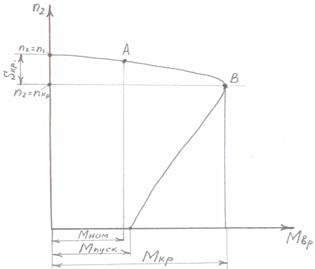
Механическая характеристика – представляет собой графическую зависимость частоты вращения ротора (n2) от величины вращающего момента (Мвр). При снятии данной характеристики вращающий момент изменяют за счет изменения механической нагрузки на валу двигателя.
Данная характеристика показывает:
1. При Мвр=0, частота вращения ротора(n2) равна частоте вращения магнитного поля статорных обмоток (n1). Но в реальности, даже в режиме холостого хода, на вал двигателя будет действовать момент сопротивления (трение в подшипниках крепления вала, сопротивления от воздушной среды и т.д.). Поэтому, по принципу саморегулирования, на валу двигателя всегда будет создаваться вращающий момент, компенсирующий момент сопротивления. Следовательно, всегда будет выполняться условие n2‹ n1
2. Верхняя часть характеристики до точки В считается рабочей. По этой части характеристики видно, что при увеличении механической нагрузки на валу частота вращения ротора уменьшается незначительно. Соответственно, асинхронный двигатель обладает жесткой частотной характеристикой.
3. В точке В асинхронный двигатель развивает максимальный вращающий момент, который называется критическим моментом. Для большинства асинхронных двигателей такой момент возникает при величине скольжения Sкрит=10-20%.Если величина механической нагрузки будет больше Мкр, то происходит «опрокидование» двигателя, то есть вращающий момент резко уменьшается и ротор останавливается. Данный процесс показан нижней частью механической характеристики.
Дата добавления: 2018-05-10; просмотров: 1038;
Поиск по сайту
Узнать еще
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Асинхронный 3-х разрядный
- Асинхронный RS-тpиггеp, реализация на базовых логических элементах И-НЕ,ИЛИ-HЕ. RS-тpиггеp для подавления дребезга контактов.
- Асинхронный RS-триггер на элементах ИЛИ-НЕ
- Асинхронный двигатель АЭ92-4/02.
- Асинхронный двигатель.
- Асинхронный двигатель. Устройство и условное обозначение на схемах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
