Двигатель параллельного возбуждения
 У двигателя параллельного возбуждения (шунтового) обмотка
У двигателя параллельного возбуждения (шунтового) обмотка
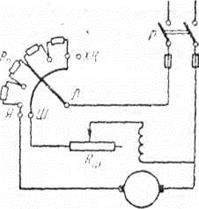
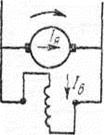
возбуждения включена параллельно обмотке якоря. Для пуска двигателя в ход применяют трехзажимный пусковой реостат (рис. 42). Напряжение сети подают к двигателю через рубильник Р. Один провод подключен непосредственно к двигателю, а второй - к зажиму Л пускового реостата. Ток по металлической рукоятке реостата поступает на металлическую дугообразную планку и через шунтовой реостат Rш - па параллельную обмотку возбуждения. Это одна цепь тока. Большая часть тока проходит по другой цепи: металлическая рукоятка реостата - пусковое сопротивление Rп - обмотка якоря. В начале пуска включены все элементы пускового сопротивления. По мере разгона двигателя рукоятку реостата поворачивают, уменьшая пусковое сопротивление реостата. В рабочем режиме пусковое сопротивление Rи выведено полностью. Зажимы реостата имеют следующие обозначения: Л - линия, Я - якорь и Ш - шунт.
Рис. 42. Схема двигателя параллельного возбуждения
Так как вращающий момент двигателя М = СмФ Iя, то для того, чтобы пусковой момент при пуске был наибольшим, нужно создать максимальный магнитный поток Ф полюсов. Поэтому пусковой реостат снабжен соединенной с обмоткой возбуждения дугообразной металлической планкой, по которой к обмотке возбуждения при пуске подводят полное напряжение сети, что обеспечивает достаточный для пуска ток возбуждения. Кроме того, при выведении рукоятки реостата на холостой контакт ХК цепь возбуждения оказывается замкнутой на реостат и якорь, вследствие чего во время прохождения тока по замкнутому контуру запасенная обмоткой возбуждения электромагнитная энергия преобразуется в тепловую и в обмотке возбуждения не наводится большая э. д. с. самоиндукции, которая могла бы привести к пробою изоляции обмотки возбуждения.
Скорость вращения якоря двигателя:
 , об/мин.
, об/мин.
Следовательно, скорость вращения якоря двигателя прямо пропорциональна напряжению U и обратно пропорциональна магнитному потоку Ф.
Значение тока якоря при работе двигателя определяется уравнением
 .
.
Если напряжение сети не изменяется, то, поскольку Rя величина постоянная, ток якоря будет зависеть от значения противо-э. д. с. Едв двигателя. С увеличением нагрузки скорость вращения двигателя снижается, и поэтому противо-э. д. с. уменьшается, а это вызывает возрастание тока якоря и соответственно увеличение вращающего момента двигателя; при уменьшении нагрузки эти зависимости приобретают противоположный характер.
Если уменьшить магнитный поток Ф, то в первый момент времени после увеличения сопротивления регулировочного реостата значительно повысится ток якоря, так как увеличится разность U — Едв. Это в соответствии с формулой
 приведет к увеличению вращающего момента, вследствие чего скорость вращения двигателя возрастет при неизменном нагрузочном моменте.
приведет к увеличению вращающего момента, вследствие чего скорость вращения двигателя возрастет при неизменном нагрузочном моменте.
Увеличение скорости вращения двигателя сопровождается увеличением э. д. с. якоря, в результате чего первоначальная величина тока якоря немного уменьшится и двигатель будет продолжать вращаться с большей установившейся скоростью.
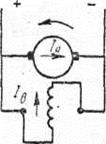
Чтобы изменить направление вращения якоря двигателя, необходимо изменить направление тока или в обмотке якоря, или в обмотке возбуждения (рис. 43).
Рис. 43. Изменение направления вращения двигателей
 Так, если направление тока в обмотке возбуждения стало противоположным, то изменится полярность полюсов, а направление тока в якоре останется прежним. Применив правило левой руки, можно убедиться в том, что якорь двигателя будет вращаться в обратную сторону. То же произойдет при изменении направления тока в якоре. При изменении полярности проводов на зажимах двигателя направление вращения якоря остается прежним.
Так, если направление тока в обмотке возбуждения стало противоположным, то изменится полярность полюсов, а направление тока в якоре останется прежним. Применив правило левой руки, можно убедиться в том, что якорь двигателя будет вращаться в обратную сторону. То же произойдет при изменении направления тока в якоре. При изменении полярности проводов на зажимах двигателя направление вращения якоря остается прежним.
Скорость вращения в двигателях параллельного возбуждения регулируют изменением магнитного потока, для чего в цепь обмотки возбуждения включают регулировочный реостат Rш (см. рис. 42).
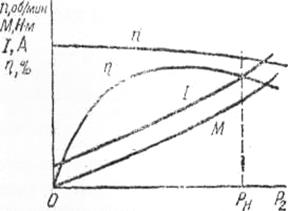
Свойства двигателя отражают его рабочие характеристики, под которыми понимают зависимости скорости вращения п, тока I, вращающего момента М и коэффициента полезного действия ŋ от
мощности Р2 на валу двигателя при постоянных значениях напряжения и тока возбуждения (рис. 44), т.е. п, I, М, ŋ = f(Рг) при U = const и Iв = const. ...........
Рис. 44. Рабочие характеристики двигателя параллельного возбуждения
Скорость вращения п двигателя с увеличением нагрузки уменьшается незначительно. Уменьшение скорости вращения происходит вследствие увеличения падения напряжения IЯRЯ в обмотке якоря. Ток двигателя с увеличением нагрузки возрастает. Вращающий момент М также повышается почти прямо пропорционально нагрузке. Поскольку скорость вращения п двигателя при увеличении нагрузки несколько снижается, то кривая момента М слегка изгибается вверх. Так как Р = Мω, то с уменьшением ω момент М увеличивается. Коэффициент полезного действия ŋ с увеличением нагрузки возрастает и достигает своего максимального значения примерно при половинном значении номинальной мощности, затем остается почти постоянным, но при перегрузке двигателя уменьшается.
Дата добавления: 2018-05-10; просмотров: 811;
Поиск по сайту
Узнать еще
- I. Двигатель параллельным возбуждением
- А – изменением подводимого напряжения; б – шунтированием обмотки возбуждения.
- Автоматизация параллельного ведения учета в нескольких стандартах
- Автоматическое регулирование возбуждения СД.
- Алгоритмы параллельного поиска и сортировки
- АНАТОМИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА.
- Анемия, ее виды. Гемолитическая болезнь как причина нарушений психики, речи и двигательных расстройств.
- Асинхронный двигатель АЭ92-4/02.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
