Измерение частоты вращения
Под скоростью вращения U (об/ мин) обычно понимают число
оборотов п твердого тела за единицу времени t = 1 мин:

где t — время, мин.
В числе производных единиц Международной системы единиц
(СИ) отсутствует термин «скорость вращения» и имеются только
следующие термины:
1) угловая скорость ω (рад/с) как отношение угла φ (рад) пово-
рота тела к времени вращения t (с):

2) частота вращения f (Гц), обозначающая число полных оборотов
за единицу времени t =1с:

где t — время, с.
Тем не менее в технической литературе, паспортах на приборы
единица «об/ мин» используется достаточно часто.
Устройства для измерения частоты вращения называются тахо-
метрами. По принципу действия они делятся на механические и
электрические. Наиболее простой конструкцией отличаются механи-
ческие тахометры. Они делятся на стационарные, т. е. монтируемые
неподвижно, и портативные. Стационарные механические тахометры
по принципу своего действия представляют собой приборы с инди-
кацией в непосредственной близости от объекта измерения. Они
соединяются с ним либо непосредственно, либо при помощи гибко-
го вала, ременной или цепной передачи. Поэтому измеренная вели-
чина может быть передана только на близкое расстояние.
По физическому принципу, положенному в основу измерения,
имеется два типа механических тахометров: тахометр на вихревых
токах и центробежный тахометр. Тахометр на вихревых токах име-
ет вращающийся постоянный магнит, поле которого возбуждает вих-
ревые токи в алюминиевом диске, соединенном с указателем. Воз-
никающий при этом вращающий момент пропорционален частоте
вращения магнита и перемещает указатель до тех пор, пока момент,
создаваемый вихревыми токами, не уравновесится моментом, создан-
ным возвратной пружиной. Тахометры этого типа применяют преиму-
щественно в тех случаях, когда показания должны начинаться с нуля,
соответствовать определенному направлению вращения и охватывать
широкий диапазон измерения. Силы, создающие перемещение, срав-
нительно невелики, что ограничивает возможности использования
этого типа тахометров для других целей, кроме индикации. Погреш-
ности составляют около ± 1 % и в простейших приборах достигают
± 3 % от конечного значения. Тахометры на вихревых токах выпуска-
ются серийно и рассчитаны на скорости до 5 ООО об/мин.
В центробежных тахометрах вращающийся маятник отклоня-
ется под действием центробежной силы и через рычажную передачу
приводит в движение стрелочный механизм. Отклонения стрелки
являются мерой частоты вращения. Центробежные тахометры по-
казывают частоту вращения не от нулевого, а от некоторого мини-
мального и до максимального значения, соотношение которых может
находиться в пределах от 1:3 до 1:10. Показания не зависят от на-
правления вращения. Достаточные по величине силы, сообщающие
движение стрелочному механизму, допускают приведение в действие
дополнительных управляющих и регулирующих устройств. Погреш-
ность измерения не превышает 1 %, в специальных исполнениях
составляет 0,3 %. Так как центробежный тахометр представляет собой
колебательную систему, он снабжен демпфирующим устройством.
Максимальная частота вращения, измеряемая серийно выпускаемы-
ми центробежными тахометрами, составляет 10 000 об/мин.
Объект измерения должен обеспечивать возможность установки
тахометра или подключения его вручную. Механические тахометры
могут быть снабжены электрическими или пневматическими преоб-
разователями, позволяющими использовать их для целей управления
и контроля.
Электрические тахометры (под ними понимаются все тахометры,
дающие на выходе электрический сигнал) значительно удобнее меха-
нических как по возможности использования для измерения различ-
ных физических эффектов, так и по возможности дальнейшей обра-
ботки измерительных сигналов. Они могут быть разделены на две
основные группы: аналоговые и дискретные. Различие этих двух ме-
тодов обусловлено в основном применяемыми датчиками. Достоин-
ством как аналогового, так и дискретного способа является возмож-
ность размещения показывающего прибора на расстоянии от места
измерения, т. е. дистанционное измерение частоты вращения.
При а н а л о г о в о м методе с датчика скорости снимается вы-
ходной сигнал в виде напряжения или тока, пропорционального
измеряемой скорости вращения. Такие датчики называются тахоге-
нераторами. Любой тахогенератор должен быть жестко связан с
объектом измерения и, как и механические тахометры, приводится
во вращение энергией, потребляемой от объекта измерения. Тахоге-
нераторы вырабатывают непрерывный сигнал, пропорциональный
частоте вращения объекта измерений. Их особое достоинство за-
ключается в том, что в них нет подвижных токонесущих деталей, и
поэтому они работают практически без износа.
При д и с к р е т н о м методе измерения частота вращения опреде-
ляется подсчетом числа импульсов, создаваемых при каждом обо-
роте за единицу времени, или числа единиц времени между двумя
импульсами. Съем данных измерения может осуществляться механи-
чески (в результате срабатывания контактов), но основное преиму-
щество дискретного метода заключается в возможности бесконтакт-
ной передачи данных. Электрические тахометры, взаимодействующие
с объектом измерения без непосредственного контакта с вращаю-
щимся телом, потребляют от объекта незначительное количество
энергии либо работают совсем без затраты энергии объекта. Связь
такого тахометра с объектом измерения осуществляется индукцион-
ным, магнитным или фотоэлектрическим путем. Такие тахометры
пригодны для измерения очень высоких скоростей и на очень малых
объектах. Частота импульсов, снимаемых с этих тахометров, менее
восприимчива к помехам, чем напряжение, пропорциональное ча-
стоте вращения. Тахометры этого типа, как правило, требуют источ-
ник вспомогательной электрической энергии. Между чувствительным
элементом прибора, воспринимающим измеряемую величину, и его
выходным устройством находятся элементы согласования, преобра-
зующие измерительный сигнал в форму, пригодную для дистанцион-
ной передачи измеренной величины. Так как в основу этого метода
измерения положен цифровой принцип, то, как правило, использу-
ются цифровая индикация и обработка данных измерения.
Общим для всех электрических тахометров является возможность
дистанционной передачи результатов измерений и их контроля и
протоколирования совместно с результатами измерения других па-
раметров. Возможно преобразование выходного сигнала в цифровой
код, допускающий дальнейшую обработку в микропроцессорах.
Существует также возможность стробоскопического измерения
частоты вращения. Хотя стробоскопический эффект используется
преимущественно для исследования характера движения вращаю-
щихся тел, однако он может быть использован и для измерения ча-
стоты вращения. В этом случае съем сигнала осуществляется опти-
ческим методом, для чего на вращающуюся деталь наносят светлую
метку. Это мобильный, лишенный обратной реакции на объект спо-
соб измерения.
Точное определение частоты вращения различных механизмов
необходимо во многих областях техники. Так, частота вращения валов
газотурбинных установок является основным параметром при пусках
и остановах газоперекачивающих агрегатов. Рассмотрим несколько
таких устройств более подробно.
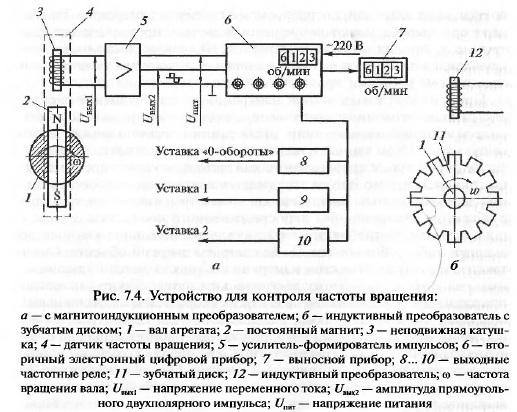
В устройстве, показанном на рис. 7.4, а, использован магнитоин-
дукционный преобразователь. Постоянный магнит 2, закрепленный
на валу агрегата 1, и неподвижная катушка 3 образуют датчик часто-
ты вращения 4. Он соединяется с усилителем-формирователем 5
коротким (до 10 м) отрезком термостойкого экранированного про-
вода с наружной изоляцией экрана, а усилитель-формирователь со
вторичным прибором 6 — бронированным многожильным контроль-
ным кабелем. Выходные частотные реле 8, 9 И 10 обеспечивают
формирование дискретных сигналов в систему защиты и управле-
ния при достижении частотой вращения заданных значений уста-
вок. Выносной прибор 7 обеспечивает необходимой информацией
оператора. При вращении вала 1 с магнитом 2 в неподвижной ка-
тушке 3 датчика 4 индуцируется напряжение переменного тока
Uвых1, амплитуда и частота ƒвых которого пропорциональны частоте
вращения вала ω. Форма этого напряжения зависит от формы торце-
вых поверхностей магнита 2, от зазора и параметров катушки 3 и
представляет собой гармонически изменяющееся напряжение с обя-
зательным переходом через 0. При изменении частоты вращения
валов от минимально измеряемой (для ГТУ это 12 об/мин, или 0,2 Гц)
до максимальной амплитуда выходного напряжения может изменяться
от 0,1 до 300 В.
При малых значениях выходною сигнала, изменяющегося в пределах
от 0,1 до 2...3 В и соответствующего небольшим частотам вращения
ГТУ в зоне «0-обороты» и до 400 об/мин, большое влияние на показа-
ния приборов оказывают внешние электростатические наводки, дей-
ствующие на входе прибора 6. Эти наводки, напряжения которых
сравнимы с напряжениями информативного сигнала, могут вызывать
искажения показаний и ложные срабатывания выходных реле, что
приводит к ложным остановкам газоперекачивающего агрегата. Имен-
но для исключения этих явлений в непосредственной близости от дат-
чика 4 устанавливается усилитель-формирователь импульсов 5, который
формирует прямоугольные двухполярные импульсы с постоянной ам-
плитудой (не менее 10 В), не зависящей от амплитуды выходного сиг-
нала датчика 4, и частотой, равной частоте этого сигнала. Промежуточ-
ное преобразование сигнала в прямоугольные импульсы исключает
влияние помех на показания вторичного прибора. Измерение частоты
входных импульсов, соответствующей измеряемой частоте вращения
вала 7, производится по четырех- или пятиразрядному индикатору
вторичного прибора 6. Этот прибор обеспечивает также контроль ис-
правности датчика и линий связи (световая сигнализация неисправ-
ности), ручную регулировку уставок срабатывания частотных реле
8... 10, визуальный контроль настройки уставок, питание постоянным
напряжением усилителя-формирователя импульсов 5 и выход элек-
трического сигнала, пропорционального измеряемой величине, для
дистанционного измерения частоты вращения вала на выносном при-
боре 7.
Поскольку на одном агрегате обычно происходит измерение и
сигнализация не менее двух частот вращения, рассмотренные устрой-
ства выполняются двухканальными и обеспечивают одновременное
измерение двух частот вращения валов ГТУ (на рис. 7.4, а показан
один канал измерения). Питание устройства осуществляется напря-
жением переменного тока 220 В. Погрешность измерения частоты
вращения и срабатывания уставок не превышает 0,2 %.
При использовании магнитоиндукционного преобразователя с
постоянным магнитом за один оборот вала ГТУ формируется только
два разнополярных импульса, частота следования которых пропор-
циональна частоте вращения вала. Это приводит к тому, что при
малых частотах вращения надежное измерение затруднено.
Более достоверные измерения обеспечивают устройства с индук-
тивным преобразователем и зубчатым диском, устанавливаемым на
валу. При использовании зубчатого диска (рис. 7.4, б) за один оборот
вала на выходе преобразователя формируется не два импульса, а
20...40 и более импульсов (в зависимости от числа зубцов диска),
амплитуда которых практически не зависит от частоты вращения вала
с зубчатым диском.
Существуют также устройства для контроля частоты вращения на
базе тахогенератора переменного тока, который представляет собой
двухфазную асинхронную электромашину с полым немагнитным
ротором. На статоре тахогенератора размещаются две сдвинутые на
90° обмотки (возбуждения и генераторная). Обмотка возбуждения
подключается к источнику переменного тока. В генераторной обмот-
ке, являющейся выходной, при вращении ротора наводится ЭДС
вращения, под действием которой на выходе тахогенератора возни-
кает напряжение, амплитуда и частота которого пропорциональны
частоте вращения ротора, а следовательно, и вала: Uвых = ƒ(ω). Эта
функция нелинейная. При изменении направления вращения рото-
ра фаза выходного напряжения изменяется на 180°.
Контрольные вопросы
1. Для чего необходимо контролировать вибрацию различных механиз-
мов?
2. На какие группы подразделяются датчики вибрации в зависимости от
измеряемого параметра?
3. Какие устройства называются проксиметрами?
4. На каком физическом эффекте основана работа оптического преобразо-
вателя виброскорости?
5. Поясните принцип действия пьезоакселерометра.
6. Как называются устройства для измерения частоты вращения?
7. В чем заключается разница между аналоговыми и дискретными электри-
ческими тахометрами?
Гл а в а 8
Дата добавления: 2022-05-27; просмотров: 163;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
