Индуктивные датчики
Принцип работы индуктивных датчиков (ИД) основан на изме-
нении индуктивности или взаимоиндуктивности обмотки с магни-
топроводом вследствие изменения магнитного сопротивления маг-
нитной цепи датчика под воздействием измеряемой величины. ИД
относятся к классу параметрических датчиков. Наиболее широко ИД
применяются для преобразования линейных и угловых перемещений,
а также технологических параметров, преобразуемых в перемещение
(давление, расход и др.). Они также используются в дефектоскопии
для определения наличия дефектов, толщины немагнитных покрытий
на стали и в ряде других областей.
Простейший одинарный (однотактный) ИД линейного пере-
мещения (рис. 2.1, а) с переменным воздушным зазором 5, значение
которого является измеряемой величиной, состоит из сердечника 1,
подвижного якоря 2, связанного с контролируемым объектом X, и
обмотки питания 3, которая является одновременно измерительной
обмоткой. В этом датчике происходит цепочка преобразований
Х-» δ-» Rm -» L, где X— измеряемое перемещение; δ —
воздушный зазор между сердечником и якорем; RM — магнитное
сопротивление цепи датчика; Ф — магнитный поток; L — индуктив-
ность обмотки 3; Z— ее полное сопротивление; I — ток в обмотке.
Статическая характеристика датчика представляет собой зависи-
мость тока в обмотке от зазора δ. Ток I в обмотке

где Uп — напряжение питания; R — активное сопротивление обмот-
ки; ω — циклическая частота напряжения питания; L — индуктив-
ность обмотки.
Поскольку R << ω, активным сопротивлением можно пренебречь.
Индуктивность L и магнитный поток Ф равны соответственно

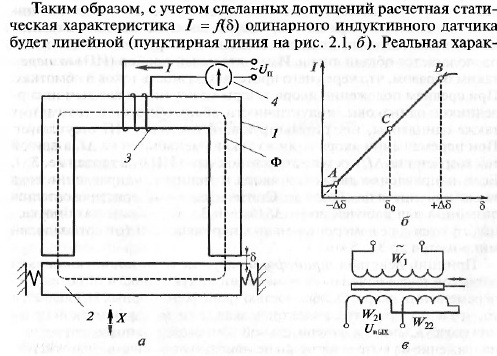

теристика (сплошная линия на том же рисунке) на начальном (до
точки А) и конечном (после точки В) участках отличается от рас-
четной. Это связано с тем, что при малом зазоре RM становится
сопоставимым с Rme, а при большом зазоре начинает влиять актив-
ное сопротивление R обмотки. Участок АВ является рабочей зоной
датчика. По ее центру выбирается начальное значение зазора δ0
(точка С).
Одинарные ИД имеют небольшое относительное перемещение
∆δ/δ0 = 0,1...0,15. Целый ряд недостатков, таких как малая рабочая
зона, невысокая чувствительность, влияние на результат преоб-
разования электромагнитного усилия притяжения якоря к сердеч-
нику, колебания температуры и напряжения питания, существенно
ограничивает их практическое использование. Обычно такие дат-
чики применяются в тех случаях, когда необходимо ступенчатое
релейное управление, например в качестве бесконтактных датчиков
положения, концевых выключателей, датчиков положения и др. Для
измерения же небольших перемещений применяются двухтактные
(реверсивные) ИД, включаемые по дифференциальной схеме. Эти
датчики состоят из двух сердечников, идентичных по конструктив-
ным и магнитным параметрам, с двумя также одинаковыми обмот-
ками, включенными последовательно и встречно. Между ними
располагается общий якорь. Измерительный прибор (ИП) включен
таким образом, что через него протекает разность токов в обмотках.
При среднем положении якоря зазоры между ним и каждым из сер-
дечников одинаковы, индуктивности обеих обмоток и токи в них
также одинаковы, т.е. результирующий ток через ИП отсутствует.
При перемещении якоря один из токов уменьшится на А/, а другой
ток возрастет на ∆I, в результате чего ток через ИП будет равен I = 2∆I.
Если направление движения якоря изменится, направление тока
также изменится на обратное. Статическая характеристика остается
линейной для рабочей зоны ∆δ/δ0 = 0,3 ...0,4. Такие датчики ис-
пользуются для измерения малых перемещений (от сотых долей
микрометра до 3 ... 5 мм).
Принцип действия трансформаторных (взаимоиндуктивных)
датчиков также основан на изменении индуктивности обмоток при
перемещении якоря. Особенностью трансформаторных ИД является
то, что в них отсутствует электрическая связь между обмоткой пита-
ния (возбуждения) и измерительной обмоткой, что позволяет менять
напряжение на выходе нагрузки независимо от величины напряжения
источника питания. Наводимая в измерительной обмотке ЭДС
Е равна

где Wи — число витков измерительной обмотки; ω — циклическая
частота напряжения питания; Ф — амплитуда магнитного потока; δ —
воздушный зазор между якорем и сердечником.
Следовательно, изменяя Wи, можно получить любое требуемое
значение выходного сигнала. Наибольшее распространение получил
дифференциально-трансформаторный датчик (рис. 2.1, в), принцип
действия которого основан на изменении потокосцепления между
двумя системами обмоток при перемещении подвижного плунжера.
Первичная обмотка W1 равномерно распределена по длине датчика.
Две одинаковые вторичные обмотки W21 и W22, расположенные на
разных половинах датчика, включены последовательно и встречно.
При симметричном расположении подвижного плунжера ЭДС Ег1 и
Е22 наводимые во вторичных обмотках, компенсируют друг друга,
поэтому UВЫХ = 0. При перемещении плунжера появится выходное
напряжение UВЫХ = Е21 - Е22, фаза которого будет зависеть от направ-
ления перемещения плунжера.
Существуют также трансформаторные датчики угла поворота.
Индуктивные датчики обладают такими достоинствами, как
простота конструкции и надежность в работе; большая выходная
мощность, позволяющая во многих случаях обойтись без усилителя;
высокая чувствительность и разрешающая способность; безынерци-
онность (при условии, что частота изменения измеряемого переме-
щения гораздо меньше частоты источника питания); наличие на
статической характеристике большого линейного участка; возмож-
ность работы непосредственно от сети переменного тока.
Емкостные датчики
Принцип действия емкостных датчиков (ЕД), которые также
являются датчиками параметрического типа, основан на изменении
емкости конденсатора под воздействием измеряемой величины. Чаще
всего ЕД выполняются в виде плоскопараллельного или цилиндри-
ческого конденсатора переменной емкости. Емкость С плоского ЕД
определяется по формуле

где ε0 — электрическая постоянная; ε — относительная диэлектри-
ческая проницаемость среды между пластинами; S — площадь пла-
стин; δ — расстояние (зазор) между пластинами.
Поскольку емкость датчика зависит от трех параметров (S, δ, ε), то
существуют ЕД трех типов: 1) датчики с переменной площадью пере-
крытия пластин — для измерения линейных и угловых перемещений,
усилий; 2) датчики с переменным зазором δ, которые используются для
измерения малых перемещений, быстропеременных параметров, таких
как вибрация, ускорение; 3) датчики с переменной диэлектрической
проницаемостью среды ε — для измерения уровня, влажности, концен
трации, в охранной сигнализации и др. Статические характеристики
датчиков перемещения будут соответственно иметь вид

где а — ширина пластин конденсатора; х — измеряемое перемещение;
δ0 — начальный зазор.
Емкостные датчики с переменным воздушным зазором целесооб-
разно использовать для измерения малых линейных перемещений
(менее 1 мм), причем максимальное перемещение X не должно пре-
вышать 0,180. Это позволяет выбрать на статической характеристике
достаточно линейный участок. Емкостный датчик с переменной
площадью перекрытия пластин используется для измерения больших
линейных (более 1 см) и угловых (до 180°) перемещений.
Измерение емкости датчиков производится мостовым, резонансным
или импульсным методом. Для повышения чувствительности использу-
ют источники питания высокой частоты (от 400 Гц до нескольких мега-
герц). Преимуществами емкостных датчиков являются простота кон-
струкции, высокая чувствительность, малая инерционность, небольшой
вес и габариты, отсутствие подвижных контактов, простота приспособ-
ления формы конденсатора к различным задачам; недостатками —
низкая выходная мощность, нестабильность характеристик при измене-
нии параметров окружающей среды, необходимость тщательной экра-
нировки датчика и применения высокочастотного источника питания.
Дата добавления: 2022-05-27; просмотров: 58;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
