Пуск и регулирование частоты вращения двигателей постоянного тока.
Проблема пуска двигателей постоянного тока связана с весьма малым сопротивлением обмотки якоря, который подключается к напряжению сети. Поскольку в момент пуска противоЭДС двигателя E равна нулю, то ток якоря ограничивается только сопротивлением якорной цепи:
1ап = U/ Rа.
При пуске с номинальным напряжением ток якоря в 10...50 раз будет превышать свое номинальное значение. Такой ток недопустим, поскольку из-за больших электродинамических усилий, пропорциональных квадрату тока якоря, может привести к разрушению обмотки, вызвать сильное искрение под щетками из-за чрезмерных плотностей тока. Поскольку электромагнитный момент двигателя увеличивается пропорционально росту тока, это может привести к механическим ударам и поломке узла, соединяющего вал двигателя и приводимого механизма.
Пусковой ток двигателей по указанным причинам необходимо уменьшать до значений, не превышающих 2,5 1ан. Для этой цели либо снижают подводимое напряжение, либо включают последовательно с обмоткой якоря пусковой реостат. Пуск при пониженном напряжении возможен, если двигатель подключен к отдельному регулируемому источнику постоянного тока. В этом случае напряжение источника плавно увеличивают при включении двигателя, что позволяет избежать больших толчков тока.
Максимальное значение сопротивления пускового реостата выбирают таким, чтобы обеспечивать в первый момент пуска ток в цепи якоря не превышающих 2,5 1ан . При разгоне двигателя растет наводимая в его обмотке ЭДС, вследствие чего ток якоря уменьшается, а сопротивление пускового реостата также постепенно надо уменьшать. Когда частота вращения двигателя достигает установившегося значения, реостат выводят полностью (RП= 0).
При пуске необходимо обеспечить минимальное время пуска, путем обеспечения наибольшего пускового момента. Увеличить пусковой момент Мп при ограничении пускового тока можно только за счет увеличения магнитного потока Ф, поскольку момент пропорционален току и потоку. Таким образом, пуск всегда осуществляют при наибольшем возможном для данного двигателя потоке возбуждения, каковым является его значение, соответствующее номинальное номинальному току возбуждения. Поэтому при пуске двигателя с параллельным или независимым возбуждением полностью выводят регулировочный реостат RВ и обмотку возбуждения включают на полное напряжение сети (рис. 6.1).
При пуске двигателя последовательного возбуждения пусковой реостат, включенный в цепь якоря и обмотки возбуждения, выводится по мере разгона. Как уже отмечалось, нельзя включать этот двигатель без нагрузки на валу, которая должна быть не менее 20...25% от номинального момента.
Для реверсирования двигателя (изменения направления его вращения) достаточно изменить полярность либо на зажимах якоря, либо на зажимах обмотки возбуждения. Обычно, в силу большой электромагнитной инерции (индуктивности) обмотки возбуждения изменяют полярность напряжения якоря. При этом магнитный поток сохраняет полярность, а ток якоря изменяет свое направление, и двигатель вращается в противоположную сторону. В промышленных электроприводах для этой цели используют аппараты — реверсивные контакторы.
Как следует из анализа уравнения механической характеристики (6.9), частоту вращения двигателя постоянного тока независимого или параллельного возбуждения можно регулировать тремя способами:
– путем изменения добавочного сопротивления цепи якоря;
– путем изменения напряжения на зажимах якоря (только для машины с независимым возбуждением);
– изменением (уменьшением или ослаблением) магнитного потока.
При изменении добавочного сопротивления в цепи якоря частота вращения идеального холостого хода остается неизменной. По мере увеличения сопротивления добавочного реостата угол наклона механических характеристик возрастает тем больше, чем больше величина сопротивления, вследствие чего формируется семейство реостатных характеристик 2, 3, 4 (рис. 6.3, а). Это позволяет получить новые значения частот вращения.
При всей простоте способа, он обладает существенными недостатками: регулирование является ступенчатым; связан с большими потерями энергии при регулировании, поскольку ток якоря проходит по регулирующему элементу. Например, при получении частоты вращения равной половине номинальной, половина мощности теряется на пускорегулирующем реостате. По этой причине способ регулирования частоты двигателей параллельного и последовательного возбуждения путем изменения сопротивления якорной цепи применяется для двигателей, мощность которых не превышает нескольких кВт, например, в крановых электроприводах.
Наибольшее применение получил способ регулирования путем изменения напряжения на якоре машины с независимым возбуждением при условии, что добавочного сопротивления в цепи якоря нет, а ток возбуждения равен номинальному. В этом случае частота вращения двигателя постоянного тока примерно пропорциональна приложенному напряжению U. Поскольку работа двигателя при напряжении, превышающем номинальное, обычно недопустима, то данный способ позволяет регулировать частоту вращения вниз от значения, соответствующего естественной характеристике. Напомним, что естественной называют характеристику, полученную при номинальном напряжении, номинальном токе возбуждения и отсутствии в цепи якоря двигателя добавочных сопротивлений.
Для реализации этого способа необходим источник с регулируемым постоянным напряжением. В качестве такового широко использовались системы генератор-двигатель (Г-Д), управляемый ртутный выпрямитель — двигатель (УРВ-Д). Система Г-Д включает двигатель постоянного тока, якорь которого подключен непосредственно к якорю генератора постоянного тока, приводимого во вращение асинхронным, а для мощных приводов — синхронным двигателем. Регулирование тока возбуждения генератора от минимального до номинального позволяет получить необходимое напряжение и частоту вращения двигателя постоянного тока.
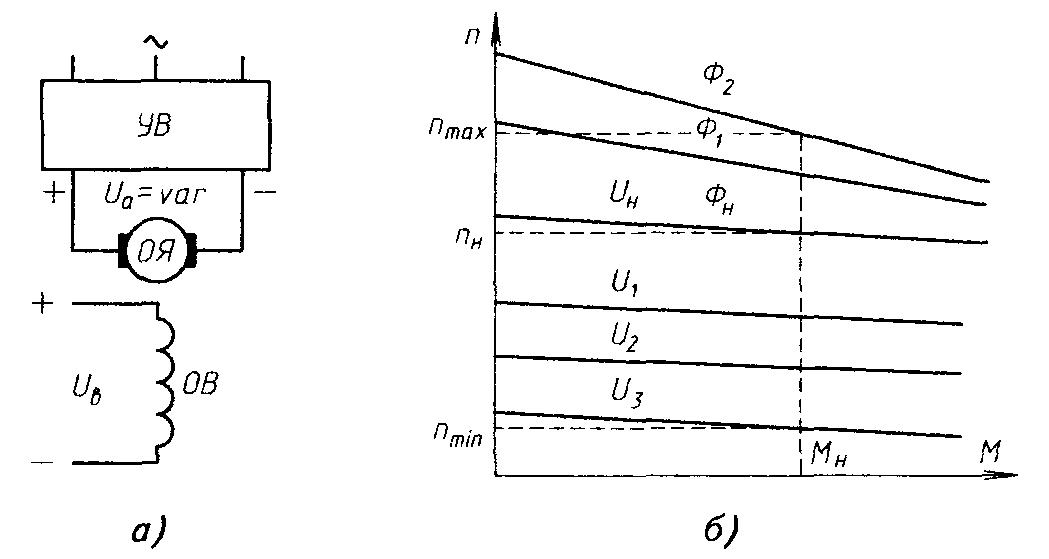
Рис. 6.5. Система «управляемый выпрямитель—двигатель» (а) и механические характеристики при изменении напряжения на якоре и магнитного потока (б)
Системы Г-Д вытесняются в настоящее время системами управляемый полупроводниковый выпрямитель—двигатель на базе тиристоров (УВ-Д), питающимися от трехфазной сети (рис. 6.5, а). Однако применение мощных систем УВ-Д существенно влияет на качество электроэнергии электрических сетей, загружая их спектром высших гармоник. Поэтому для электроприводов мощностью тысяча и более кВт таких, например, как электроприводы прокатных станов, система Г-Д, несмотря на громоздкость и дороговизну, сохраняет привлекательность и в настоящее время.
Как следует из анализа уравнения (6.9), при изменении напряжения на якоре будет изменяться только частота вращения идеального холостого хода, тогда как вторая составляющая уравнения остается неизменной, поскольку не зависит от напряжения.
Механические характеристики двигателя независимого возбуждения при номинальном токе возбуждения и сопротивлении якорной цепи Rа при разных значениях напряжения на якоре U показаны на рис. 6.5,б.
Эти характеристики представляют собой параллельные прямые линии, соответствующие напряжениям UН, U1, U2и т.д., причем (UН > U1> U2>…). При номинальной нагрузке частота вращения изменяется от номинальной nН до минимальной nмин.
Достоинством рассматриваемого способа регулирования являются широкий диапазон и высокая плавность регулирования, неизменная жесткость механических характеристик во всем диапазоне регулирования и связанная с этим стабильность регулирования. В автоматизированных системах УВ-Д принципиально возможно поддержание неизменной частоты вращения при изменении нагрузки от нуля до номинального значения.
В качестве дополнительного к рассмотренному способу регулирования для расширения диапазона регулирования применяют ослабление магнитного потока, т. е. при номинальном напряжении якоря уменьшают ток возбуждения. Механические характеристики проходят выше естественной и тем круче, чем меньше магнитный поток.(рис. 6.5,6).
Регулирование скорости вращения двигателя постоянного тока последовательного возбуждения осуществляют преимущественно путем введения в цепь якоря дополнительного сопротивления (рис. 6.4). Чем оно больше по величине, тем круче проходят механические характеристики. Наиболее широко такое регулирование применяется в электроподвижном транспорте, в крановых электроприводах.
Дата добавления: 2017-11-21; просмотров: 3448;
Поиск по сайту
Узнать еще
- I.3.4 ВЗАИМНЫЕ ПРЕВРАЩЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- RLC-контур с параллельным соединением элементов в цепи переменного тока.
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- А) Корпускулярное излучение.
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Автоматизированный электропривод переменного тока с непосредственным преобразованием частоты (НПЧ).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
