торможение противовключением.
Генераторное торможение. Машина переходит в режим генератора, если ротор начнет вращаться быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т. е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть.
Одно из достоинств генераторного торможения у асинхронных машин заключается в том, что переход в режим генератора происходит автоматически, как только ротор начинает вращаться быстрее магнитного поля. Это защищает асинхронные двигатели От аварийной ситуации, которая может наступить у двигателей постоянного тока. Асинхронные двигатели не могут пойти в разнос. Максимальная частота вращения ротора ограничивается частотой вращения магнитного поля.
Генераторное торможение является самым экономичным режимом, так как происходит преобразование механической энергии в электрическую и возврат энергии в сеть. Одно из достоинств этого тормозного режима состоит в его самопроизвольном появлении, т. е. не требуется никакая контролирующая аппаратура.
Динамическое торможение. Этот тормозной режим используется для точной остановки мощных двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т.е. он станет тормозным. Под действием этого момента происходит торможение. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать время торможения.
Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После останов ки двигатель нужно отключить от сети постоянного тока. Основные недостатки динамического торможения: необходим источник постоянного тока и неэкономичность.
Торможение противовключением. Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
Для торможения двигателя нужно изменить порядок чередования фаз, т. е. переключить две фазы.
Достоинством этого тормозного режима является быстрое торможение, так как тормозной момент действует на всем тормоз ном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
АСИНХРОННОГО ДВИГАТЕЛЯ
Число оборотов ротора в минуту определяется следующим выражением:

Из выражения видно, число оборотов ротора асинхронного двигателя можно регулировать изменением любой из трех величин:f1 , р, S.
Регулирование частоты вращения асинхронного двигателя с по мощью изменения частоты тока сети возможно на базе полупроводниковой техники. При таком регулировании частота вращения изменяется плавно.
Изменение числа полюсов электрической машины возможно, если на статоре выполнено несколько (обычно две) обмоток с раз личным числом полюсов или одна обмотка, допускающая переключения на различное число полюсов. При изменении числа полюсов обмотки статора изменится скорость вращения его магнитного поля, а следовательно, и частота вращения ротора двигателя. Этот способ регулирования является достаточно экономичным, но недостаток его состоит в ступенчатом изменении частоты вращения двигателя. Кроме того, стоимость такого двигателя возрастает вследствие усложнения обмотки статора и увеличения габаритных размеров машины.
Регулирование частоты вращения этим способом применяется в двигателях с короткозамкнутым ротором.
Изменение скольжения можно получить путем введения в цепь обмотки ротора регулирующего реостата. Регулирующий реостат включается в цепь обмотки фазного ротора подобно пусковому, но в отличие от пускового этот реостат рассчитывается на длительную нагрузку током. Этот способ регулирования частоты вращения Синхронных двигателей имеет ряд существенных недостатков: дополнительные потери в реостате, малый диапазон регулирования.
Асинхронные двигатели являются наиболее распространенны ми среди электрических двигателей и выпускаются со стандартизованными номинальными значениями синхронных частот вращения для промышленной частоты сети 50 Гц: 3 ООО; 1 500; 1 ООО; 750 375; 300; 250; 187,5; 166,6; 150; 125; 100 об/мин.
Номинальные рабочие частоты асинхронных двигателей не сколько меньше синхронных из-за наличия скольжения.
КОЭФФИЦИЕНТ МОЩНОСТИ
АСИНХРОННОГО ДВИГАТЕЛЯ
Коэффициент мощности асинхронного двигателя определяется соотношением

где P1 Q1, S1 активная, реактивная и полная мощность двигателя соответственно.
Активная мощность двигателя Р1 складывается из мощности на валу Р2 (полезной мощности) и мощности потерь  Р:
Р:
P1= Р2+ Р.
Потери складываются из электрических потерь (потери на нагрев обмоток) Рэл; потерь в стали (потери на нагрев сердечника) Рст и механических потерь Рмех:
Р= Рэл+ Рст+ Рмех.
Электрические потери Рэл зависят от токов в обмотках и возрастают при увеличении нагрузки на валу. Потери в стали не зависят от нагрузки на валу, а зависят от подведенного к обмотке статора напряжения. Механические потери относятся к постоянным потерям.
В номинальном режиме cos  н = 0,85 — 0,9, в режиме холостого хода cos х = 0,1 —0,2.
н = 0,85 — 0,9, в режиме холостого хода cos х = 0,1 —0,2.
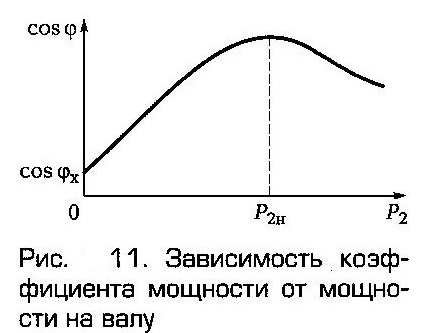 Снижение cos х объясняется тем, что активная мощность мала (Р1х = Рэл+ Рст+ Рмех). А реактивная мощность Q1 остается такой же, как и в номинальном режиме. Зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу показана на рис. 11. При большой недогрузке асинхронного двигателя он имеет низкий коэффициент мощности, что экономически невыгодно.
Снижение cos х объясняется тем, что активная мощность мала (Р1х = Рэл+ Рст+ Рмех). А реактивная мощность Q1 остается такой же, как и в номинальном режиме. Зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу показана на рис. 11. При большой недогрузке асинхронного двигателя он имеет низкий коэффициент мощности, что экономически невыгодно.
Для повышения cos при малой нагрузке рекомендуется
пони жать подведенное к двигателю напряжение.
При этом уменьшается реактивная мощность, а
коэффициент мощности повышается.
3.МАШИНЫ ПЕРЕМЕННОГО ТОКА
СИНХРОННЫЕ МАШИНЫ
ОСНОВНЫЕ ПОНЯТИЯ И ОБЛАСТЬ ПРИМЕНЕНИЯ
В синхронных машинах частота вращения ротора равна частоте вращения магнитного поля статора и, следовательно, определяется частотой тока сети f и числом пар полюсов p:

Как и всякая электрическая машина, синхронная машина является обратимой, т. е. может работать в режиме как генератора, так и двигателя.
В 1876 г. русский ученый П. Н. Яблочков разработал несколько образцов многофазных синхронных генераторов с электромагнитным возбуждением и электрически несвязанными фазами, предназначенных для питания созданных им дуговых электрических ламп (свечи Яблочкова). Первый трехфазный синхронный генератор изобрел известный русский электротехник М. О. Доливо - Добровольский. Этот генератор имел мощность 230 кВ • А, приводился во вращение от гидротурбины и обеспечивал электроснабжение международной электротехнической выставки во Франкфурте в 1891 г. по четырех проводной электрической линии трехфазного тока.
Основная электромагнитная схема синхронных машин с тех пор оставалась неизменной, но усовершенствовалось их конструктивное выполнение и возросли электромагнитные нагрузки, что позволило значительно улучшить массогабаритные и энергетические показатели и нагрузочную способность синхронных машин. Внешний вид синхронного генератора представлен на рис. 12.
| Рис.12. Внешний вид синхронного генератора |
Синхронные машины используют главным образом в качестве источников электрической энергии переменного тока; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на передвижных электростанциях и транспортных установках (тепловозах, автомобилях, самолетах). Конструкция синхронного генератора определяется в основном типом привода.
В зависимости от этого различают турбогенераторы, гидрогенератор и дизель – генераторы.Турбогенераторы приводятся во вращение паровым и или газовыми турбинами, гидрогенераторы — гидротурбинами, дизель – генераторы — двигателями внутреннего сгорания. Синхронные машины широко используют также в качестве электродвигателей при мощности 100 кВт и более для привода насосов, компрессоров, вентиляторов и других механизмов, работающих при постоянной частоте вращения. Для генерирования или потребления реактивной мощности в целях улучшения коэффициента мощности сети и регулирования ее напряжения применяют синхронные компенсаторы. В электробытовых приборах (магнитофонах, проигрывателях, киноаппаратуре) и системах управления широкое применение по лучили различные синхронные микромашины — с постоянными магнитами, индукторные, реактивные, гистерезисные, шаговые.
ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО
СИНХРОННЫХ МАШИН
Как и все электрические машины, синхронные имеют статор и ротор. Ротор синхронной машины представляет собой электромагнит, возбуждаемый постоянным током. В синхронных машинах малой мощности вместо обмотки на роторе могут использоваться постоянные магниты.
Статор 1 синхронной машины (рис. 13, а) выполнен так же, как и асинхронной: на нем расположена трехфазная (в общем случае многофазная) обмотка 3. Обмотку ротора 4, питаемую от источника постоянного тока, называют обмоткой возбуждения, так как она создает в машине магнитный поток возбуждения. Вращающуюся обмотку ротора соединяют с внешним источником постоянного тока посредством контактных колец 6 и щеток 5 (рис. 13, б). При вращении ротора 2 с некоторой частотой n2 поток возбуждения пересекает проводники обмотки статора и индуцирует в ее фазах переменную ЭДС Е, изменяющуюся с частотой

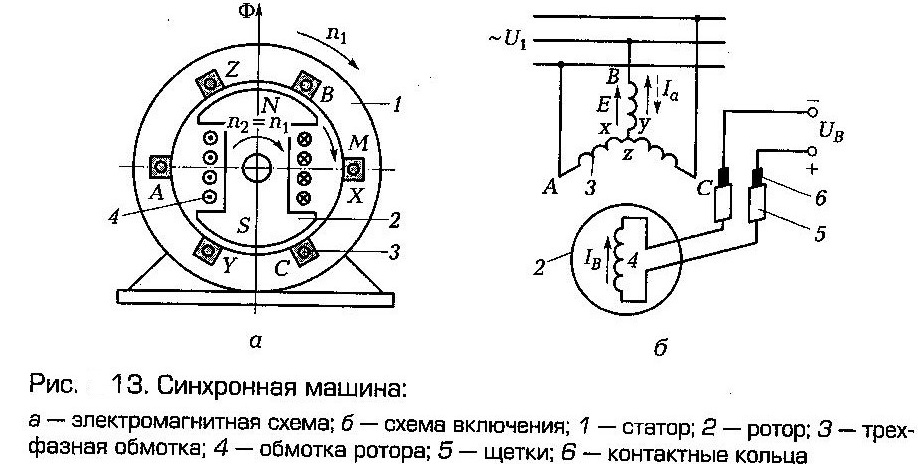
Если обмотку статора подключить к какой-либо нагрузке, то про ходящий по этой обмотке многофазный ток Iа создает вращающееся магнитное поле, частота вращения которого:

Из формул (2) и (3) следует, что n1 = n2, т. е. ротор вращается с той же частотой, что и магнитное поле статора. Такую машину называют синхронной.
Результирующий магнитный поток Ф синхронной машины создается совместным действием МДС обмотки возбуждения и обмотки статора, и результирующее магнитное поле вращается в пространстве с той же частотой, что и ротор.
В синхронной машине обмотку, в которой индуцируется ЭДС и проходит ток нагрузки, называют обмоткой якоря, а часть машины, на которой расположена обмотка возбуждения, — индуктором. Следовательно, в приведенной машине (см. рис. 13) статор является якорем, а ротор — индуктором. Для принципа действия и теории работы машины не имеет значения — вращается якорь или индуктор, поэтому в некоторых случаях применяют синхронные машины с обращенной конструктивной схемой: обмотку якоря, к которой подключают нагрузку, располагают на роторе, а об мотку возбуждения, питаемую постоянным током, — на статоре. Такую машину называют обращенной. Обращенные машины имеют сравнительно небольшую мощность, так как у них затруднен отбор мощности от обмотки ротора.
Запомните
Для установившихся режимов работы синхронной машины характерны следующие особенности:
· ротор машины, работающей как в двигательном, так и в генераторном режимах, вращается с постоянной частотой, равной частоте вращающегося магнитного поля, т.е. n2 = n1 ,поэтому машина называется синхронной;
· частота изменения ЭДС, индуцируемой в обмотке якоря, пропорциональна частоте вращения ротора;
· в установившемся режиме ЭДС в обмотке возбуждения не индуцируется; МДС этой обмотки определяется только током возбуждения и не зависит от режима работы машины.
Пример 2. Для получения ЭДС с частотой 50 Гц двух полюсный генератор должен сделать 3000
об/мин (  =
=  50 Гц)
50 Гц)
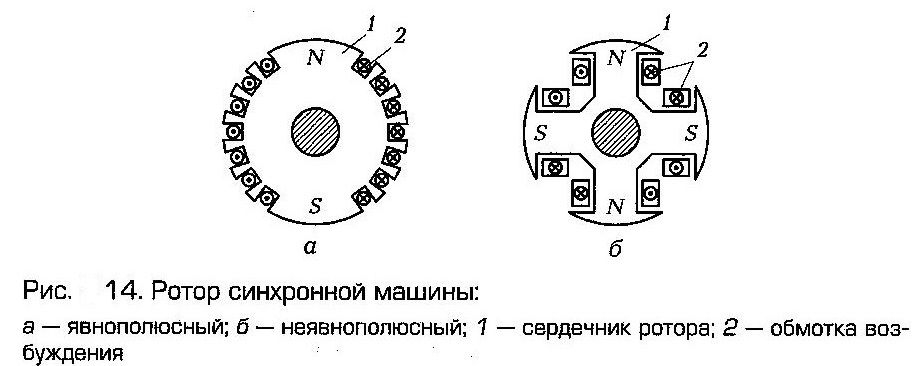
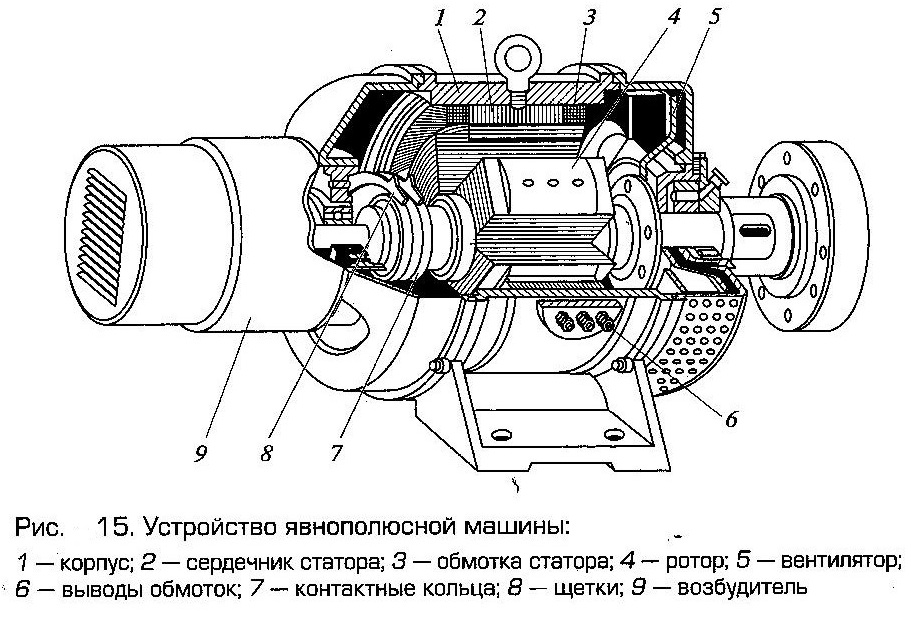
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой индуктивные катушки обмотки постоянного магнита размещены на выступающих полюсах (рис. 14, а), и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 14, б).
Двух- и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1 500 и 3 000 об/мин, изготовляют, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения не обходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляют немагнитными клиньями. Лобовые части обмотки, на которые воздействуют значительные центробежные силы, крепят с помощью стальных массивных бандажей.
Явнополюсная синхронная машина изготовляется для скорости вращения до 1 500 об/мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение гидравлическими турбинами, частота вращения которых составляет 50 — 500 об/мин. Машины этого типа могут быть использованы и в качестве дизель – генераторов, которые приводятся во вращение двигателями внутреннего сгорания, с частотой вращения от 100 до 1 500 об/мин.
Устройство явнополюсной машины представлено на рис. 15.
Турбогенераторы приводятся во вращение быстроходными паровыми или газовыми турбинами и конструктивно выполняются неявнополюсными. Вал в них расположен горизонтально. Диаметр ротора по условиям механической прочности ограничен размерами 1 — 1,5 м. Предельная длина ротора 7,5 — 8,5 м; она ограничена допустимым прогибом вала. Мощность турбогенераторов составляет 800— 1200 МВт.
Гидрогенераторы приводятся во вращение гидравлическими турбинами, частота вращения которых составляет 50 — 500 об/мин. Генераторы выполняют с большим числом полюсов и явнополюсными роторами. В гидрогенераторах мощностью более 500 МВт диаметр ротора превышает 15 м при длине ротора около 2 м.
Дизель – генераторы приводятся во вращение двигателями внутреннего сгорания. Их изготовляют явнополюсными с горизонтальным расположением вала. Мощность таких генераторов бывает от нескольких киловольт-ампер до нескольких мегавольт-ампер при частотах вращения от 100 до 1 500 об/мин. Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью вращения 3 000 об/мин (при частоте 50 Гц).
Запомните
· Ротор синхронной машины может быть явно- и неявнополюсным.
· Синхронные генераторы применяются в качестве основных устройств, производящих электрическую энергию на электростанциях, и разделяются на турбо-, гидро- и дизель – генераторы.
ХАРАКТЕРИСТИКИ СИНХРОННОГО
ГЕНЕРАТОРА
Эксплуатационные свойства синхронного генератора в значительной степени определяются его внешней и регулировочной характеристиками.
Если синхронный генератор не нагружен (работает вхолостую), То тока в обмотках статора нет и напряжение U на зажимах генератора равно ЭДС Е0, созданной в обмотке статора.
Напряжение U на зажимах генератора, работающего под на грузкой, существенно отличается от ЭДС Е0 при холостом ходе. Это отличие тем больше, чем больше реактивное сопротивление нагрузки.
Внешние характеристики U = f(Iя) синхронного генератора, показывающие изменения напряжения на зажимах генератора при изменении тока для активной и реактивной нагрузок, изображены на рис. 16.
На практике нагрузка генератора в большинстве случаев является активно-индуктивной.
Падение напряжения на активно-индуктивной нагрузке обусловлено размагничивающим действием реакции якоря и в незначительной степени падением напряжения на внутренним индуктивном сопротивлении машины.
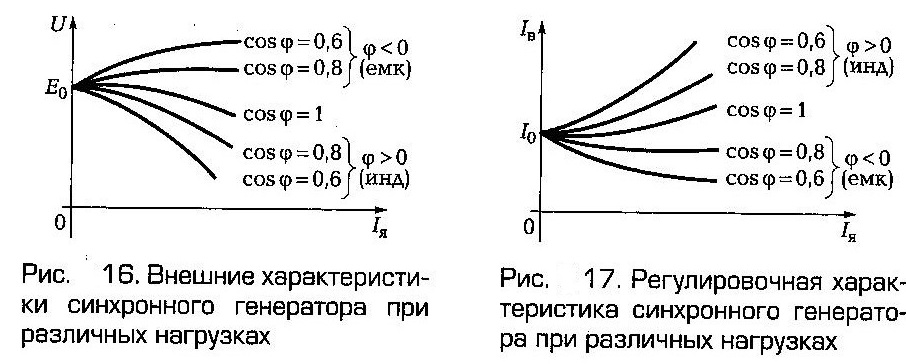
Подъем характеристик при емкостной нагрузке обусловлен подмагничивающим действием реакции якоря.
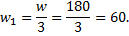
Зависимости тока возбуждения Iв от тока нагрузки Iн при неизменных напряжении U, угле  и частоте f1, называют регулировочными характеристиками (рис. 17). Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки. Очевидно, что с возрастанием нагрузки при > 0 необходимо увеличивать ток возбуждения, а при < 0 — уменьшать его. Чем больше угол по абсолютной величине, тем в большей степени требуется изменять ток возбуждения.
и частоте f1, называют регулировочными характеристиками (рис. 17). Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки. Очевидно, что с возрастанием нагрузки при > 0 необходимо увеличивать ток возбуждения, а при < 0 — уменьшать его. Чем больше угол по абсолютной величине, тем в большей степени требуется изменять ток возбуждения.
Запомните
· Реакция якоря при индуктивной нагрузке будет размагничивающая, т.е. результирующее поле машины ослабляется.
· Реакция якоря при емкостной нагрузке — подмагничивающая, т. е. результирующее поле усиливается.
ПАРАЛЕЛЛЬНАЯ РАБОТА СИНХРОННЫХ
ГЕНЕРАТОРОВ
Синхронные генераторы в качестве источников электроэнергии переменного тока включаются параллельно в распределительную сеть. Необходимым условием включения генератора на параллельную работу с сетью является его синхронизация, т. е. достижение совпадения чередования фаз, частот, начальных фаз и значений напряжений сети и генератора. Момент совпадения фаз сети и генератора контролируют синхроноскопами. Для включения генераторов на параллельную работу используют автоматическую синхронизацию, которая позволяет регулировать напряжения и частоты так, как это необходимо. Применяется также метод самосинхронизации, сущность которого заключается в том, что генератор включают в сеть невозбужденным при частоте вращения ротора, близкой к синхронной, а затем включают ток возбуждения и ротор генератора втягивается в синхронизм.
Пример 3. Определить напряжение на зажимах синхронного трехфазного генератора, работающего в режиме холостого хода, при соединении обмоток «треугольником» и «звездой», если частота f= 50 Гц, количество вит ков, размещенных в пазах статора, w = 180, обмоточный коэффициент kоб = 0,9, амплитудное значение магнитного потока одной фазы Фm = 0,01 Вб.
Решение
Число витков одной фазы обмотки статора
Вращающийся магнитный поток
Ф= 1,5Фm = 1,5 · 0,01 = 0,015 Вб.
Электродвижущая сила, индуцируемая в каждой фазе,
Еф = 4,44fkобw1Ф = 4,44· 50· 0,9 · 60 · 0,015= 179,8 В  180 В.
180 В.
При холостом ходе генератора и соединении его обмоток «треугольником» напряжение на зажимах равно ЭДС:
 = Еф=180В
= Еф=180В
При соединении обмоток «звездой» напряжение на зажимах
U =  ЗЕф = 3 · 180 = 311,4 В.
ЗЕф = 3 · 180 = 311,4 В.
СИНХРОННЫЕ ДВИГАТЕЛИ. ПРИНЦИП
ДЕЙСТВИЯ И УСТРОЙСТВО
Синхронный двигатель не имеет принципиальных конструктивных отличий от синхронного генератора. Трехфазную статорную обмотку (якорь) двигателя подключают к сети трехфазного переменного тока и создают вращающееся магнитное поле, число оборотов которого

На роторе двигателя помещается обмотка возбуждения, подключаемая к источнику постоянного тока (обычно регулируемому выпрямителю). Ток возбуждения создает магнитный поток полюсов. Вращающееся магнитное поле, возбуждаемое токами обмотки ста тора, увлекает за собой полюсы ротора. При этом ротор вращается только с синхронной частотой, т.е. с частотой, равной частоте вращения поля статора. Таким образом, частота вращения синхронно го двигателя строго постоянна, если неизменна частота тока питаю щей сети.
Синхронные двигатели производят преимущественно с явновыраженными полюсами, и работают они в нормальном режиме с перевозбуждением при опережающем cos = 0,8.
Синхронные двигатели имеют следующие преимущества:
· возможность работы при cos = 1; это приводит к улучшению cos сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
· меньшая чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
· строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
· сложность конструкции;
· сравнительная сложность пуска в ход;
· трудности с регулированием частоты вращения, которое воз можно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cos и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Запомните
· Частота вращения ротора синхронного двигателя равна частоте вращения магнитного поля статора и не зависит от нагрузки; синхронный двигатель имеет абсолютно жесткую механическую характеристику.
· Несмотря на наличие дополнительного источника постоянного тока для возбуждения синхронные двигатели нередко используются в промышленности, так как позволяют регулировать cos потребителя и тем самым снизить потери при передаче электроэнергии.
ПУСК СИНХРОННОГО ДВИГАТЕЛЯ
Пуск в ход синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, скорость которого устанавливается мгновенно. На ротор, если он возбужден, действует знакопеременный момент, среднее значение которого за период равно нулю. Электромагнитный момент возникает и может заставить ротор вращаться только в том случае, когда полюсы поля статора будут медленно перемещаться относительно полюсов возбуждения ротора.
Запомните
Для пуска в ход двигателя необходимо предварительно увеличить число оборотов ротора до синхронной скорости или близкой к ней.
Для разгона синхронных двигателей применяют асинхронный пуск. Для этого в полюсных наконечниках ротора синхронного двигателя укладывается пусковая обмотка, выполненная в виде беличьего колеса подобно короткозамкнутой обмотке ротора асинхронного двигателя. После разгона ротора двигателя до частоты вращения, близкой к синхронной, составляющей примерно 0,95n1, в обмотку возбуждения подается постоянный ток и ротор втягивается в синхронизм.
Отключаемую от источника питания обмотку возбуждения за мыкают на активное сопротивление. Если же обмотку оставить разомкнутой, то вращающийся магнитный поток статора индуцирует в ней ЭДС в 20— 30 раз больше номинального напряжения возбуждения и это может привести к пробою изоляции обмотки ротора. Синхронные двигатели обычно пускаются прямым включением в сеть статорной обмотки, и только мощные двигатели требуют ограничения пускового тока.
ПОТЕРИ И КПД СИНХРОННЫХ
МАШИН
В синхронных машинах имеют место электрические потери в роторе и статоре, магнитные потери в сердечнике статора, механические потери на вентиляцию и трение вращающихся частей. Коэффициент полезного действия трехфазного синхронного генератора определяется по формуле
Коэффициент полезного действия трехфазного синхронного двигателя
Сумма потерь

где Рм — потери в меди обмоток статора, Рм = 3I2 R, Рст — потери в стали статора; Рмех — механические потери (потери на трение); РВ — потери на возбуждение; РА — добавочные потери.
Коэффициент полезного действия мощных синхронных генераторов достаточно высок и достигает 0,98; КПД синхронных двигателей, тем выше, чем больше мощность двигателя, и составляет 0,91 — 0,96.
Пример 4. Трехфазный синхронный двигатель с номинальной мощностью РН = 600 кВт и номинальным напряжением UН = 400 В имеет следующие данные: частота f = 50 Гц, количество полюсов 2p = 4, КПД η1 = 0,96, коэффициент мощности cos  Н = 0,8 (при токе, опережающем по фазе на пряжение). Определить частоту вращения ротора, номинальный вращающий момент, активную и реактивную мощности, потребляемые из сети, ток статора и его реактивную составляющую.
Н = 0,8 (при токе, опережающем по фазе на пряжение). Определить частоту вращения ротора, номинальный вращающий момент, активную и реактивную мощности, потребляемые из сети, ток статора и его реактивную составляющую.
Решение
Частота вращения ротора

Номинальный вращающий момент

Активная мощность
Полная мощность

Реактивная мощность:

Ток статора

Реактивная (емкостная) составляющая тока
Iр = Iм sin = 1,15 · 0,6 = 0,69 А
4.МАШИНЫ ПОСТОЯННОГО ТОКА
ОСНОВНЫЕ ПОНЯТИЯ И ОБЛАСТЬ ПРИМЕНЕНИЯ
Машины постоянного тока применяют в качестве электродвигателей и генераторов. Двигатель и генератор постоянного тока имеют одинаковое устройство. Электродвигателям постоянного тока присущи хорошие регулировочные свойства и значительная перегрузочная способность. Они позволяют получать жесткие и мягкие механические характеристики.
Конструкция двигателей постоянного тока сложнее, и их стоимость выше, чем асинхронных двигателей.
Однако в связи с широким применением автоматизированного электропривода и тиристорных преобразователей, позволяющих питать электродвигатели постоянного тока регулируемым напряжением от сети переменного тока, эти электродвигатели широко используют в различных отраслях экономики.
Генераторы постоянного тока ранее широко использовались для питания электродвигателей постоянного тока в стационарных и передвижных установках, а также как источники электрической энергии для заряда аккумуляторных батарей, питания электролизных и гальванических ванн, для электроснабжения различных электрических потребителей на автомобилях, самолетах, пассажирских вагонах, электровозах, тепловозах и др.
Принципиальная возможность создания электродвигателя постоянного тока была впервые показана М. Фарадеем в 1821 г. В созданном им приборе проводник, по которому пропускали постоянный ток, вращался вокруг магнита.
Двигатель постоянного тока с электромагнитным возбуждением был создан в России академиком Б. С.Якоби в 1834 г., который назвал его магнитной машиной. В 1838 г. им был построен более мощный электродвигатель, который использовался для привода гребного винта речного катера. Значительное развитие теория электрических машин постоянного тока получила в трудах Д. А. Лачинова. В 1880 г. он опубликовал труд «Электромеханическая работа», в котором рассмотрел вопросы создания вращающего момента электродвигателя, КПД электрических машин, условия питания электродвигателя от генератора и дал классификацию машин постоянного тока по способу возбуждения.
В XX столетии продолжались развитие теории и совершенствование конструкции машин постоянного тока. Большое внимание обращалось на повышение надежности этих машин путем устранения причин, вызывающих возникновение искрения под щетками (улучшения коммутации) и образование кругового огня на коллекторе.
ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО
ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Действие любого электрического генератора основано на ис пользовании закона электромагнитной индукции, поэтому генератор постоянного тока, как и генератор переменного тока, состоит из полюсов и якоря с обмоткой. Простейшим генератором является виток, вращающийся в магнитном поле полюсов N и S (рис. 18).
В витке 1 индуцируется переменная во времени ЭДС. При при соединении концов витка к контактным кольцам, вращающимся вместе с витком, в нагрузке через неподвижные щетки 2, 3 протекает переменный ток, т.е. такая машина является генератором переменного тока. Для преобразования переменного тока в постоянный применяют коллектор, который играет роль механического выпрямителя переменного тока, индуцируемого в витке 1. Концы витка 1 присоединяют к двум медным полукольцам (сегментам), называемым коллекторными пластинами. При вращении витка коллекторные пластины вращаются с валом машины так, что каждая из щеток 2, 3 соприкасается то с одной, то с другой пластиной.
Щетки на коллекторе устанавливаются так, чтобы они переходили с одной пластины на другую в тот момент, когда ЭДС, индуцируемая в витке, будет равна нулю. Таким образом, щетка 2 в любой момент времени соприкасается с проводником, который находится под полюсом S, а щетка 3 контактируется всегда только с тем из про водников, который находится под полюсом N. Следовательно, ЭДС на щетках 2 и 3 не меняет знака и ток по внешнему участку электрической цепи будет протекать в одном направлении от щетки 2 через сопротивление R к щетке 3.
Направление ЭДС во внешней цепи остается неизменным, а величина ее меняется во времени и получается не постоянная, а пульсирующая ЭДС, и соответственно ток во внешней цепи будет также пульсирующим (рис. 19).
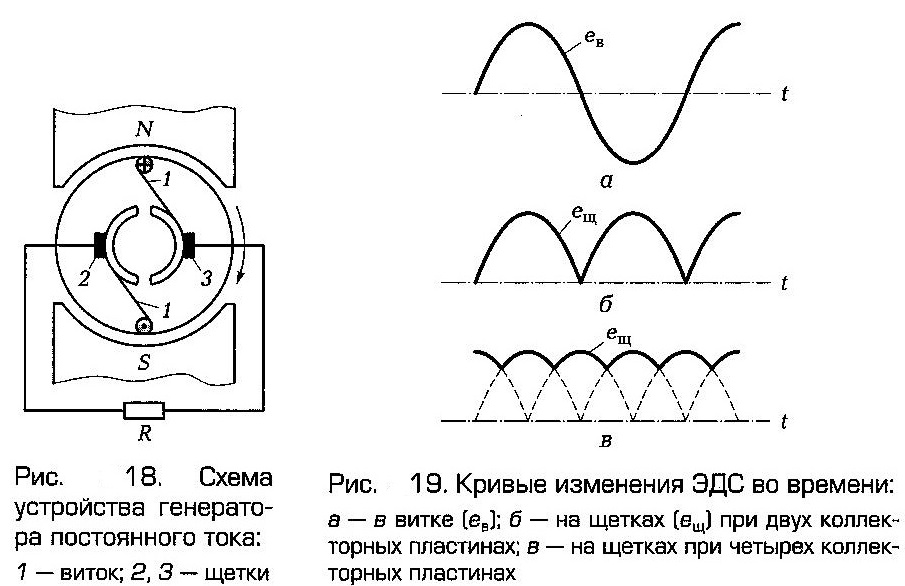
При увеличении числа коллекторных пластин пульсация тока во внешней цепи уменьшается и при 16 пластинах на пару полюсов пульсация составляет менее 1 %. Таким образом, при большом числе коллекторных пластин ЭДС и ток во внешней цепи будут практически постоянны.
Как и всякая электрическая машина, генератор постоянного тока имеет неподвижную и вращающуюся части. Неподвижная часть машины называется индуктирующей, т.е. создающей магнитное поле, а вращающаяся — индуктируемой.
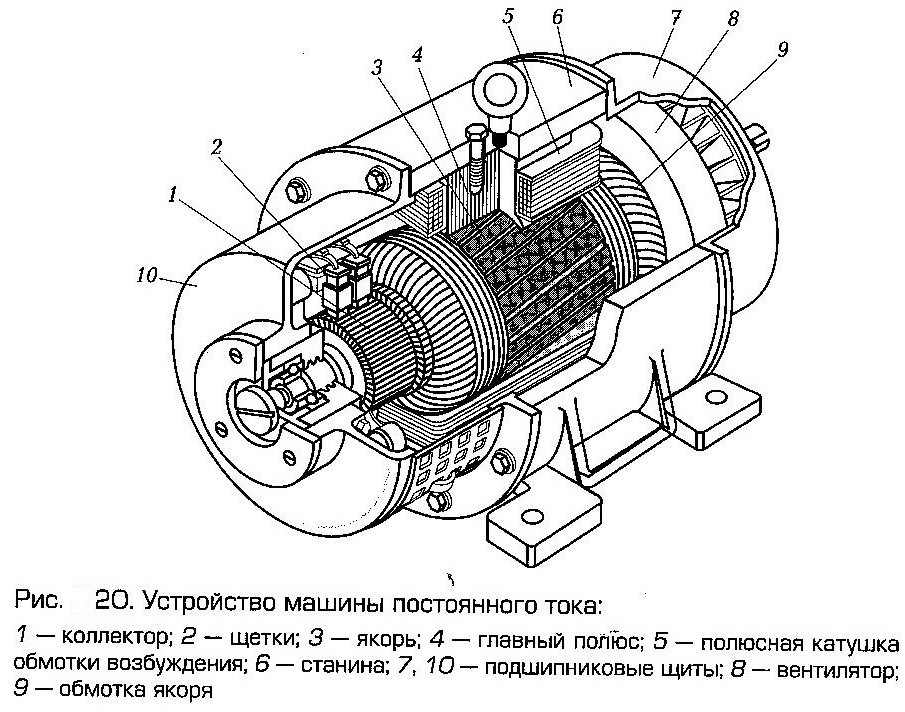
Машина постоянного тока с одной парой полюсов (р = 1) представлена на рис. 20. Число полюсов может быть и больше, но это всегда четное число, т. е. 2р.
На внутренней поверхности стального корпуса станины 6 ста тора укреплены полюсы 4 с обмотками возбуждения 5. Обмотки возбуждения питаются постоянным током и создают магнитный поток, который замыкается через станину статора, сердечники полюсов, воздушные зазоры и сталь якоря 3. С торцов корпус машины закрыт подшипниковыми щитами 7 и 10. На роторе рас положены якорь 3 с коллектором 1 и вентилятор 8 для охлаждения машины. Вал ротора закреплен на подшипниках для уменьшения потерь при вращении. С помощью специальных муфт он соединяется с механическим устройством. Якорь представляет собой цилиндрический сердечник, в пазах которого уложены и закреплены медные проводники. Эти проводники, соединенные в определенном порядке, образуют замкнутую обмотку 9 якоря. Коллектор имеет форму цилиндра и состоит из медных пластин, изолированных друг от друга и от вала. К каждой пластине присоединены начала про водников обмотки якоря. Обмотка якоря с внешней цепью связана че рез щетки 2, которые пружинами плотно прижаты к коллектору. Щеткодержатели
крепятся на подшипниковом щите 10 машины.
 Рассмотрим особенности работы машин постоянного тока. При прохождении тока в скользящем контакте щеток с коллектором возможно возникновение искрения, которое, естественно, не желательно, поскольку разрушает коллектор и щетки. Для уменьшения искрения необходимы периодическая проточка, шлифовка коллектора и другие меры для поддержания хорошего качества скользящего контакта.
Рассмотрим особенности работы машин постоянного тока. При прохождении тока в скользящем контакте щеток с коллектором возможно возникновение искрения, которое, естественно, не желательно, поскольку разрушает коллектор и щетки. Для уменьшения искрения необходимы периодическая проточка, шлифовка коллектора и другие меры для поддержания хорошего качества скользящего контакта.
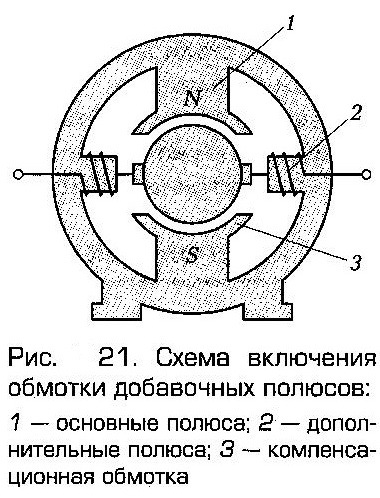
Ток якоря создает в машине собственный магнитный поток,
который искажает и даже уменьшает магнитный поток машины.
Это явление называется реакцией якоря. Из-за реакции якоря
снижается ЭДС машины и ухудшаются условия работы коллектора,
при этом усиливается искрение под щетками. Для улучшения
коммутации между основными полюсами 1 машины устанавливают
дополнительные полюса 2 (рис. 21). Токи обмоток коллектора
создают в зоне коммутации магнитный поток, противоположный
магнитно
Дата добавления: 2021-10-28; просмотров: 360;
Поиск по сайту
Узнать еще
- Вопрос 31. Служебное торможение.
- Генераторное торможение с рекуперацией (отдачей) энергии в сеть.
- ОПИСАНИЕ ТОРМОЗНОЙ СИСТЕМЫ С РАЗДЕЛЬНЫМ С ТОРМОЖЕНИЕМ ТЕЛЕЖЕК И НОВЫМ ТОРМОЗНЫМ ОБОРУДОВАНИЕМ.
- ПОСТСИНАПТИЧЕСКОЕ И ПРЕСИНАПТИЧЕСКОЕ ТОРМОЖЕНИЕ
- Пресинаптическое торможение. Роль различных видов торможения
- Примеры расчета уставок дифференциальной защиты с торможением на понижающих трансформаторах
- Принцип работы дифференциальных реле с торможением ДЗТ.
- Реверсивное торможение (торможение противовключением).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
